Parece que no es suficiente que los robots sean máquinas que realicen los trabajos más repetitivos y rutinarios o bien nos faciliten la estancia en hoteles, bancos y colegios. {Con el tiempo se incide más en que su aspecto y sus características sean lo más parecidas posible a las de un humano. Y no únicamente eso, también se pretende que sientan igual que padecemos nosotros mismos al coger un objeto. Pues según lo que parece lo van a alcanzar de la mano de unos innovadores guantes.
Nuestras manos están compuestas por una red increíble de receptores sensoriales o mecanorreceptores de diferente tipo que responden ante la presión mecánica y tienen la capacidad de transformar un estímulo mecánico, químico o bien electromagnético en un impulso inquieto.
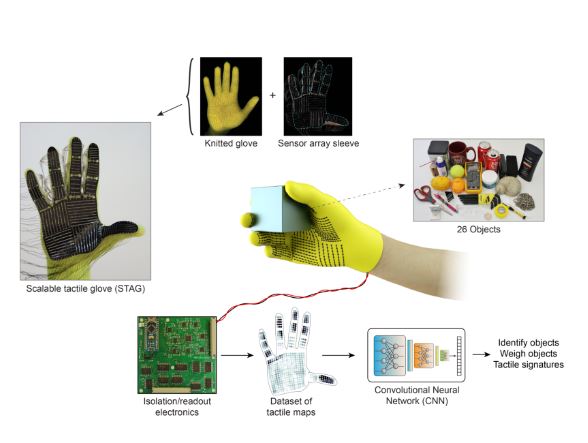
Los ingenieros del MIT han inventado un guante sensorial, de nombre Scalable Tactile Glove (STAG) formado por 550 sensores de presión ubicados en la palma del guante que producen un patrón reconocible para el robot y la Inteligencia Artificial. Este guante, conectado a un ordenador, recoge la información y la medición de la presión recogidos con esos sensores y los modifican en un “vídeo táctil” con los que “enseñar” a una red neuronal convolucional (CNN) y poder reconocer qué objetos son por el tacto.
Si bien sea difícil de creer, el material necesario para realizar los guantes dispone de un precio en torno a los 10 dólares, y se pueden encontrar con relativa sencillez. Disponen de una película atravesada por una red de sesenta y cuatro fibras conductoras en diferentes direcciones, las cuales se encuentran unidas a un guante común.
Subramanian Sundaraman, director de la investigación, ha informado que “hemos probado la utilidad de una estrategia barata y sencilla para crear sensores táctiles con los que abarcar grandes áreas”.
La utilización de esta tecnología en miembros artificiales o partes mecánicas puede ser de gran utilidad. Los desarrolladores de prótesis son capaces de emplear la información que consiguen de los sensores de presión y personalizar las prótesis, con el objetivo de que la persona pueda interaccionar de forma normal con objetos. Uno de los desafíos es que el dispositivo sea capaz de detectar el peso y la estructura del objeto. En un principio este sistema multisensorial pueda ser utilizado en pruebas médicas, en recuperaciones de lesiones y en la creación de prótesis y manos robóticas.
En un futuro poco a poco más próximo los robots dispondrán de tacto a un costo insignificante. Somos siendo conscientes de que el desarrollo es tan necesaria como urgente, y avances como el que ha conseguido el MIT, nos acerca un poco más a lograr el objetivo.
Te recomendamos: